














二維視覺測量採用單攝像機測量目標在特定平面中的位置,在二維視覺測量中,由於攝像機與測量平面之間的距離固定,這使得其應用受到很大的限制,三維視覺測量隨之應運而生。
與二維圖像信息相比,三維信息能夠更全面、真實地反映客觀物體,提供更大的信息量。近年來,各種技術應用於三維信息測量中,由此形成了各類三維測量系統。經過幾十年發展,三維視覺測量系統已具有較成熟的理論和技術基礎,生產實踐也不斷證明這類系統操作簡便、適應性強、精度高。
從狹義上講,三維視覺測量技術即通過計算機分析處理,讓計算機不僅具有和人眼一樣的視覺感受,而且能夠獲得人眼所不能直接獲得的經過量化的物體參數。
獲取空間三維物體的距離信息是三維成像、三維物體重建和計算機輔助設計中最基礎的內容,有著廣泛的實際應用價值。光學三維形貌測量具有非接觸、高精度、高效率的特點,並且在科研、醫學診斷、工程設計、刑事偵查現場痕跡分析、自動在線檢測、質量控制、機器人及許多生產過程中得到越來越廣泛的應用。為此,國際光學學會在1994年以信息光學的前沿為主題的年會上,首次將光學三維測量列為信息光學前沿的7個主要領域和方向之一。
三維形貌測量方法介紹:
三維形貌測量的方法從測量方式上可分為接觸式和非接觸式。
傳統的接觸式測量方法發展已有幾十年曆史,其機械結構及電子系統已經相當成熟。三坐標測量機和接觸式粗糙度輪廓儀是接觸式三維測量的典型代表,其原理是用採樣頭的探針接觸模型表面,採集一個輪廓點的數據,然後橫向移動一個間距,採集相鄰的輪廓點數據,最後構築整個表面的線框模型。接觸式測量方法具有較高的準確性和可靠性,但也存在以下缺點:
(1)測量時測量頭與被測物之間有接觸壓力,它不適合測量柔性物體,而且對測量頭無法觸及的表面沒有很好的測量效果;另外不當的操作容易損傷被測物體的表面,特別是高精度表面,同時也會使測量頭磨損。
(2)測量頭本身的半徑以及接觸測量時被測物體受到測量頭擠壓發生局部形變會影響測量的精度。
(3)接觸式測量是以逐點掃描的方式進行測量的,所以測量速度慢,尤其在測量較大物體時,非常耗時。
(4)由於測量機的機械結構複雜,對工作環境要求很高,必須防震、防灰、恆溫等,使其應用範圍收到一些限制。
儘管世界各國生產廠家都試圖用各種高新技術來改變這一現狀,但至今都未能從根本上解決測量機原理本身所造成的結構龐大和復雜的不足,難以滿足當今高效率、高精度測量的需求。
非接觸測量方法主要是指光學測量方法
隨著光電子技術、微電子技術的發展,各種新型器件不斷出現,如電荷耦合器件(CCD, Charge Coupled Device)、數字投影儀(DLP, Digital Light Processing)等。非接觸式光學測量技術得到快速發展,並開始在一些領域中得到廣泛應用。非接觸式光學測量方法由於其高靈敏度、高速度、無損壞、獲取數據多等優點而被公認為最有前途的三維面形測量方法。
光學三維視覺測量方法分類
光學三維視覺測量方法的種類主要分為:攝影測量法、飛行時間法、三角法、投影條紋法、成像面定位法、干涉測量法等。而獲取宏觀物體的三維信息的基本方法可以分成兩大類:被動三維傳感和主動三維傳感。被動三維傳感採用非結構光(自然光)照明方式,從一個或多個攝像系統獲取的二維圖像中確定的距離信息,形成三維面形數據。被動三維傳感需要進行大量的相關匹配運算,當被測目標的結構信息過於簡單或過於復雜,或者被測物體上各點的反射率沒有明顯差異時,這種相關匹配運算將變得十分複雜和困難。
主動三維傳感啟用結構光照明方式,這是由於物體三維表面對結構光場的空間或時間調製,觀察到的變形廣場包含了物體三維面形的信息,對變形廣場進行解調,便可以獲得三維面形數據。主動三維傳感具有非接觸、高自動化、高靈敏度、高精度等優點,因此,大多數以三維精細麵形測量為目的的系統都採用主動三維傳感方式。
三維傳感方法分類
根據物體三維表面對結構照明光場調製方式的不同,人們又將主動三維傳感方法分為時間調製與空間調製兩類。其中更為常用的是空間調製方法,根據測量原理的不同,空間調製又可以分為兩類:直接三角法和相位測量法。直接三角法 ,輪廓測量是以純粹的三角測量原理為基礎,通過出射點、投影點和成像點三者之間的幾何成像關係確定物體各點高度。
直接三角法
直接三角法的優點是信號處理簡單可靠,無需複雜的條紋分析就能唯一確定各個測量點的絕對高度信息,自動分辨物體凹凸,即使物體上的物理斷點(台階、裂縫)、陰影等使圖樣不連續的缺陷也不會影響測量;缺點是精度不高,不能實現全場測量。而近幾年來興起的相位測量法是採用面結構光照明的三角光路測量法,這類方法首先將規則的光柵條紋圖像投影到被測物表面,從另一角度看,可以觀察到由於受物體高度的影響而發生變形的條紋。這種變形可解釋為相位和振幅均為被調製的空間載波信號。採集變形條紋並從被調製的結構光場中提取所需的相位信息,然後再根據高度與相位的映射關係計算出被測物體的三維面形信息。
相位測量法
相位測量法採用面結構光進行投影,不需要對物體掃描就可以得到物體面形的三維信息,具有全場測量、高速測量的特點。但是由於求解相位時用到了反三角函數運算,相位截斷在三角函數的主值範圍內,因此還需要進行相位展開才能得到被測物體真實的相位分佈。
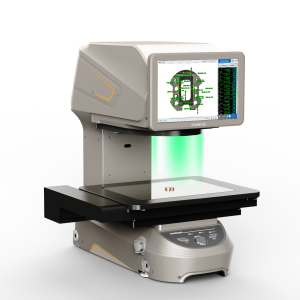
三維測量的相關知識就介紹到這裡了,希望對您有所幫助。精密視覺測量請關注普密斯的AI智能一鍵式測量儀。

技術方案
MORE+您可能也對以下信息感興趣




 詢問POMEAS
詢問POMEAS  價格垂詢
價格垂詢  申請演示/測試
申請演示/測試  免費試用
免費試用  精準選型
精準選型  電話:+ 86-0769-2266 0867
電話:+ 86-0769-2266 0867 傳真:+ 86-0769-2266 0857
傳真:+ 86-0769-2266 0857 郵箱:marketing@pomeas.com
郵箱:marketing@pomeas.com 地址
地址