














(A) 項目背景
如今,工業機器人正越來越多地被應用於工廠組裝、抓取工件,並組建替代人工完成一些高強度、高難度、複雜的工作。實際生產過程往往要求抓取一些散亂無序的工件,進行堆放。這時候,我公司經過不斷的努力和研發,引入機器視覺系統,成功解決了機器視覺與各大廠商的機械手之間通訊以及坐標轉換。
(B) 功能要求
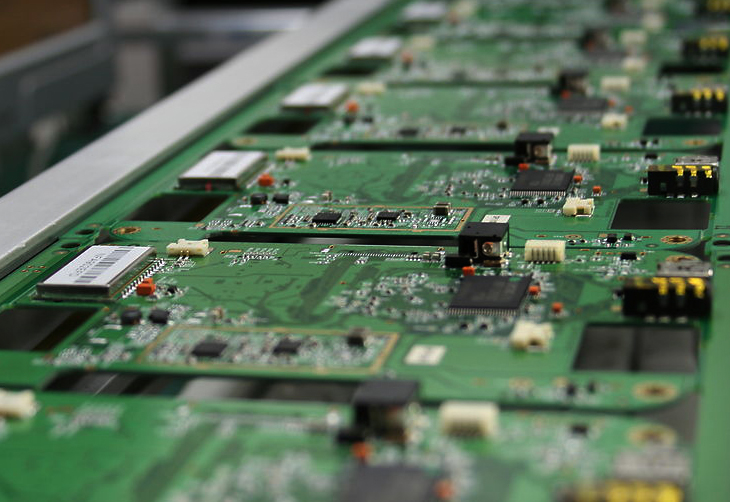
引導機械手抓取流水線上散亂的電路板,然後放在指定位置
定位精度0.5mm-1mm
軟件系統具有異常報警功能和數據統計功能
軟件系統具有鏡頭拍攝處的影像顯示
設備重複貼附精度±0.05mm
相機拍攝區域約為300*210mm
(C) system configuration
POMEAS高清遠心鏡頭 PMS-TCM017-110
普密斯500W像素工業CCD
工控機
基於普密斯VisionPro的軟件系統
安川6軸機械手

(D) 系統特點
高性價比的基於PC的解決方案
採用C#、VisionPro軟件開發的定制化操作界面,運行效率高
設備開機自動校準功能ost-effective PC-based solution




技術方案
MORE+您可能也對以下信息感興趣





 詢問POMEAS
詢問POMEAS  價格垂詢
價格垂詢  申請演示/測試
申請演示/測試  免費試用
免費試用  精準選型
精準選型  電話:+ 86-0769-2266 0867
電話:+ 86-0769-2266 0867 傳真:+ 86-0769-2266 0857
傳真:+ 86-0769-2266 0857 郵箱:marketing@pomeas.com
郵箱:marketing@pomeas.com 地址
地址